Notícias
Abertura da Página Online outubro 1, 2016
Página do projeto STOP - Seguranças robóTicos coOPerativos - aberta ao público!
Projeto Aceite setembro 8, 2016
Decisão final da aceitação do projeto submetido no âmbito do Aviso de concurso nº 33/SI/2015

Designação do projeto
STOP .: Seguranças robóTicos coOPerativos
Código do projeto
CENTRO-01-0247-FEDER-017562
Ficha do Projeto
Sobre
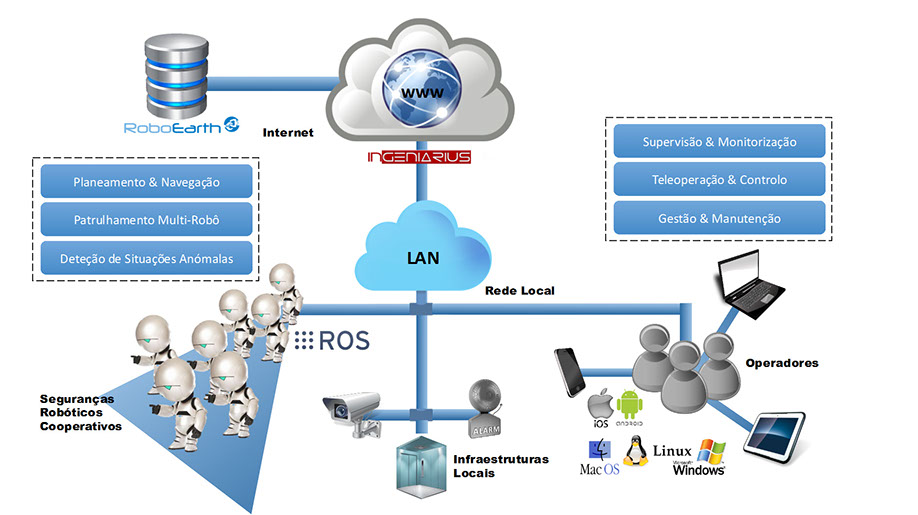
Este projeto tem como objetivo geral dar um contributo para aumentar a aceitação das tecnologias de robótica móvel na área de serviços, focando-se na instalação de equipas de robôs móveis em grandes espaços interiores frequentados por pessoas (e.g., lojas de grande dimensão, áreas comuns de centros comerciais, escritórios e serviços, museus, etc.) para executarem autonomamente missões de patrulhamento e vigilância. Este projeto envolve um esforço conjunto entre uma empresa e duas entidades do sistema científico e tecnológico Português, com vista a aproximar os robôs dos seres humanos, podendo ajudá-los nas tarefas monótonas ou repetitivas associadas à supervisão, monitorização e vigilância de infraestruturas, enquadradas no conceito de patrulhamento multi-robô para monitorização e vigilância de edifícios e instalações.
Deste modo, este projeto permite configurar uma primeira aplicação ao desenvolvimento do setor económico dos sistemas de vigilância de uma nova tecnologia baseada em robótica móvel, com perspetivas de viabilidade técnico-económica e condições de replicabilidade, pretendendo-se atingir a valorização industrial do conhecimento associado a novas tecnologias robóticas suscetíveis de serem aplicadas a nível nacional e internacional.
A utilização de equipas de robôs móveis para patrulhamento permite reduzir a exposição humana em tarefas repetitivas e de baixo valor acrescentado, que nalguns cenários acarretam risco para a vida humana (e.g., patrulhamento de grandes infraestruturas ou instalações com atmosfera tóxica, explosiva ou radioativa), seguindo a mesma linha de pensamento por trás da conceção de manipuladores industriais.
Este é um projeto da Região Centro de Portugal de meio milhão de euros cofinanciado pelo programa Portugal 2020, sob a referência CENTRO-01-0247-FEDER-017562.
Protótipos
Dada a natureza prática do projeto, e considerando a prova de conceito associada ao trabalho de investigação já desenvolvido pela equipa, torna-se fundamental a demonstração da solução proposta em ambiente operacional. Deste modo, as instalações do CTCV, localizadas em Coimbra, serão utilizadas para aferir o desempenho do sistema robótico de patrulhamento e demonstrar, em situação real, perante um público especializado, as vantagens económicas do mesmo.
Protótipo 1
Patrulhamento com uma unidade robótica para validação de características funcionais
Objetivo: Validar plataformas robóticas, incidindo em controladores, auto-localização, planeamento e navegação, autonomia energética, comportamentos reativos para navegação segura em zonas densamente frequentadas por pessoas, comunicação com a cloud.
Protótipo 2
Patrulhamento com equipa de três unidades robóticas para validação de método de patrulhamento multi-robô
Objetivo: Validar método de patrulhamento multi-robô num único piso e com equipa de dimensão reduzida, incidindo sobretudo em comunicação inter-robô para coordenação da tomada de decisão distribuída e otimização das ações de patrulhamento realizadas individualmente pelos robôs móveis, mas incluindo também funcionalidades de deployment automático e paragem programada e faseada dos robôs para carga automática das baterias.
As instalações do CTCV que servirão de infraestruturas e de espaço para demonstração do projeto apresentam uma área total útil para vigilância de mais de 5.000 m2, sendo composta por cerca de 80 divisões, todas essas consideradas como locais importantes a serem visitados pelas equipas de robôs. É de notar que este edifício tem vindo a ser utilizado como incubadora de empresas, sendo a promoção da segurança e vigilância em horário pós-laboral um fator fundamental para cativar novas entidades que lidam com matérias-primas e equipamentos de custos elevados, e.g. indústria da saúde/farmacêutica, desenvolvimento tecnológico na área da automação e robótica, desenvolvimento de novos materiais, entre outras.
Equipa
Como chefe do consórcio, a Ingeniarius é uma PME privada que incide em I&D de âmbito tecnológico, com particular enfoque na robótica. Para além de gerir o projeto, a sua principal tarefa incide no desenvolvimento das soluções robótica e integração dessas numa arquitetura em cloud.
O CTCV é uma entidade do Sistema Científico e Tecnológico Nacional, com larga experiência de participação em projetos em consórcio nacionais e europeus. Neste projeto terá um papel de utilizador final da tecnologia (end-user), usando para o efeito o edifício principal como espaço de demonstração da solução a desenvolver.
O ISR-UC é uma unidade de investigação associada da Faculdade de Ciências e Tecnologia da Universidade de Coimbra, composta por uma equipa de investigação multidisciplinar capaz de realizar investigação de excelência em sistemas e robótica, nomeadamente nas áreas de robótica móvel autónoma, nos sistemas de transporte inteligente, na robótica de busca e salvamento, na visão por computador e no patrulhamento multi-robô.
Coordenadores

Micael Couceiro Coordenador Principal Ingeniarius

Victor Francisco Coordenador CTCV CTCV

Rui Rocha Coordenador ISR-UC Universidade de Coimbra
I&D

Samuel Pereira Investigador Ingeniarius

David Portugal Investigador Ingeniarius
Munkenyi Mukhandi Investigador Ingeniarius

Farzan Majeed Noori Investigador Universidade de Coimbra

Vishnu Muthu Investigador Universidade de Coimbra

Filipe Pinto Investigador Universidade de Coimbra
Gestores

André Araujo Gestor Financeiro e Tecnológico Ingeniarius
Conferências Científicas
- Portugal, D., Pereira, S., Couceiro, M. S. (2017). The Role of Security in Human-Robot Shared Environments: A Case Study in ROS-based Surveillance Robots. The 26th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN 2017), August 28 - September 1, 2017, Lisbon, Portugal.
- Noori, F. M., Portugal, D., Rocha, R. P., & Couceiro, M. S. (2017, October). On 3D simulators for multi-robot systems in ROS: MORSE or Gazebo?. In Safety, Security and Rescue Robotics (SSRR), 2017 IEEE International Symposium on (pp. 19-24). IEEE.
Multimédia

STOP Project Poster
STOP Logo

STOP Robot 3D model

STOP Rollup

STOP Poster
Contactos
Address:
Rua Nossa Senhora da Conceição 146
4445-147 Alfena
Portugal
Mobile Phone: +351 96 117 14 09
Email address: stop@ingeniarius.pt